ORBITERの醍醐味でもあるドッキングについて解説します。
ドッキングまでのランデブーやそのための噴射に関してはココでは扱わないものとします。
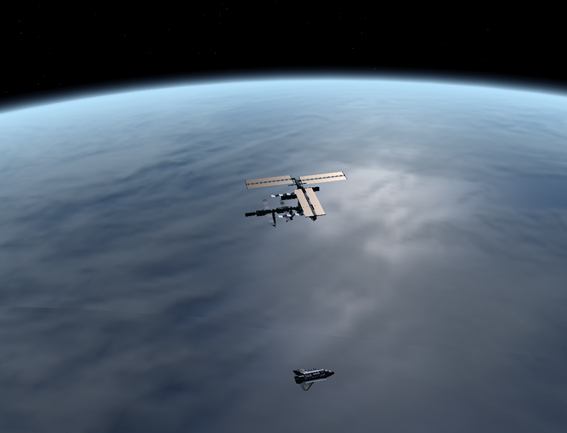
ISSとのドッキング
- 必要なもの
- Docking MFD
- GPC MFD
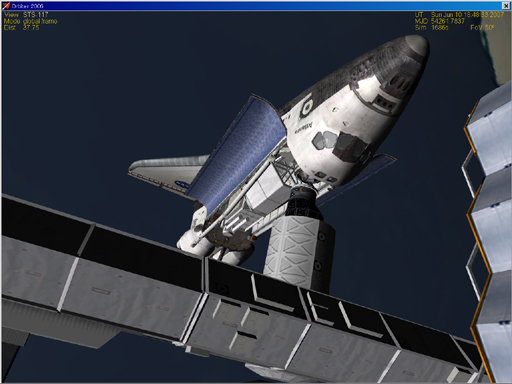
TORVAでのドッキング
TORVA(Twice Orbital Rate V-bar Approach)は実際にシャトルがISSとドッキングする際に行っているアプローチです。
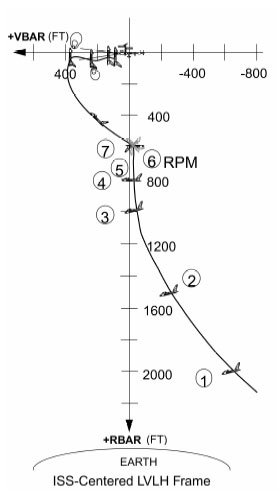
実際の挙動は以下のようになります。
実際にはDAP(Digital Auto Pilot)を使用しますがORBITERにはないのでMFDとマニュアル操作で行います。

実際にはDAP(Digital Auto Pilot)を使用しますがORBITERにはないのでMFDとマニュアル操作で行います。
Docking、GPCの各MFDを左右にセットします。
GPC MFDはOPS2を選択しておきます。

GPC MFDはOPS2を選択しておきます。

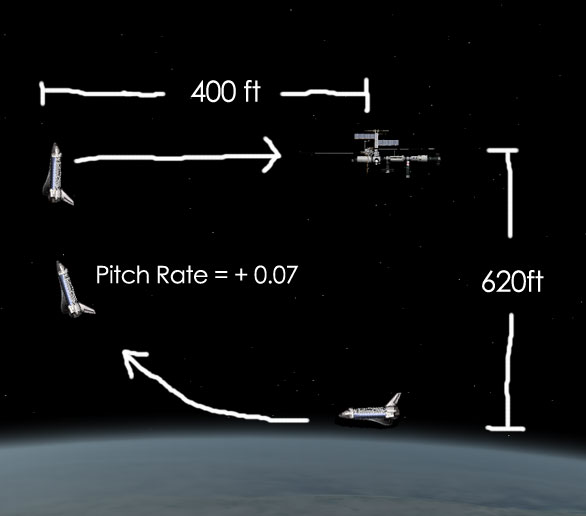
ドッキングシナリオを開始すると、ISSから約620ft下の地点にとどまっていると思うので、
Pitch RATE = +0.75 で RPMを開始します。
Pitch RATE = +0.75 で RPMを開始します。

- RPM(ランデブー・ピッチ・マニューバー)
- ISS にごく近い、通常は約600フィート (180m) の距離で、シャトルの下面の耐熱シールドが ISS から見えるように360度のピッチングを行なう。ISS の搭乗員は目視と写真(400mmと800mm)で、打ち上げ・上昇時に耐熱シールドが損傷していないかどうかを確認する。
- なお、ISS に非常に近いにも関わらずシャトルからは ISS が常に見えているわけではないため、 ISS への衝突を避けるために熟練した操縦技術が必要とされる。
- 参考映像 STS-117 RPM
360°の回転が終わったらTORVAを始めます。
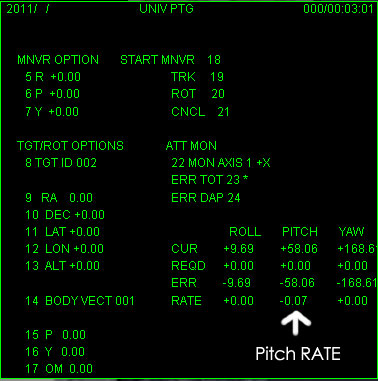
ISSとシンクロするために-0.07だったピッチレートを+0.07にします。
GPCMFD OPS2画面

さらにライナーモードでRCSを使って前進を加えることで、
ドッキングポートに向かって登っていくことが出来ます。
ドッキングポートに向かって登っていくことが出来ます。

上りきってしまう前に、Docking MFDでISS Port1をターゲットとして選択します。
Docking MFD
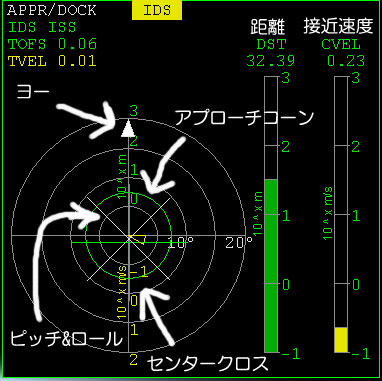

- 一番右側の黄色バーは目標に接近する速度。単位はm/sec.
その次の緑のバーは目標までの距離。
- 中心にある白の×はピッチとロールのアジャスト目標。
上下にずれればピッチを修正。
左右にずれればロールを修正。
左右にずれればロールを修正。
- 円の一番上にある▲はヨーのアジャスト目標。
コレはずれると左右に動きます。
- 序々に小さくなっていく緑の○はアプローチコーン。
外れると緑から赤に変わります。
TORVAのコースを上りきったらピッチをダンピングして-0.07に戻します。
ココまでに視点をCtrl+ZでセンターラインカメラにしてISSを捕らえておくことをオススメします。
アプローチコースにアラインしたら、スラスターを使って 0.25m/Sでアプローチします。
5mを切ったら、アプローチスピードを 0.05m/sまで減少させてドッキングします。